English
English 日本語
日本語 한국어
한국어
Giới thiệu
Ngày nay, xe điện là trung tâm của sự phát triển ngành công nghiệp ô tô. Pin xe điện đóng vai trò then chốt trong việc cung cấp năng lượng cho xe, do vậy nó trở thành một thành phần quan trọng và có giá trị. Tuy nhiên, tầm quan trọng của pin xe điện không chỉ dừng lại ở chức năng – trọng lượng, giá thành mà còn ở nhược điểm dễ hư hỏng. Chính nhược điểm này trở thành mối lo ngại của chủ sở hữu xe điện.
Ngược lại với các loại xe có động cơ đốt trong, xe điện thường có pin tích hợp trong bệ ván trượt vốn phổ biến trong ngành công nghiệp ô tô khi tích hợp bộ pin vào sàn xe. Thiết kế này mang lại nhiều lợi ích nhưng cũng tiềm ẩn nhiều rủi ro đáng kể cho chủ sở hữu xe điện. Với sự phổ biến ngày càng tăng của các gờ giảm tốc trên đường phố, mối lo ngại ngày càng tăng về khả năng hư hỏng mà các chướng ngại vật này có thể gây ra cho bộ pin nằm bên dưới xe. Việc bất cẩn vượt qua gờ giảm tốc ở tốc độ cao có thể dẫn đến việc sửa chữa tốn kém hoặc thậm chí phải thay thế toàn bộ chiếc xe.
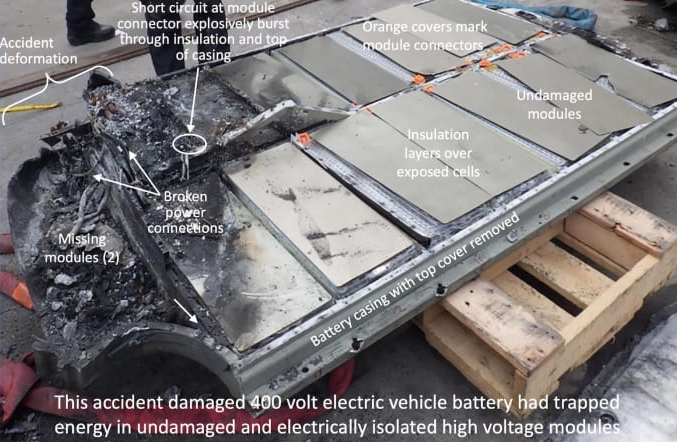
Bộ pin của xe điện bốc cháy sau khi bị hư hỏng trong một vụ tai nạn
Trong một bài báo do Reuters Information đăng vào tháng 3 năm 2023 , Christoph Lauterwasser, giám đốc điều hành của Trung tâm Công nghệ Allianz đã nhấn mạnh số lượng các trường hợp hư hỏng pin ngày càng tăng và nhấn mạnh tầm quan trọng của việc xử lý pin một cách cẩn thận nhất. Khả năng sửa chữa của bộ pin đã trở thành một vấn đề quan trọng đối với các nhà sản xuất ô tô, trong đó một số nhà sản xuất ô tô như Ford Motor Co. và General Motors Co., đang tập trung vào việc làm thế nào để sữa chữa pin xe điện trở nên dễ dàng. Tuy nhiên, Tesla Inc. đã thực hiện một cách tiếp cận khác, giới thiệu bộ pin cấu trúc mới trong Model Y do họ sản xuất ở Texas mà các chuyên gia cho rằng “không có khả năng sửa chữa”.
Tác động của việc hư hỏng ắc quy không chỉ dừng lại ở cá nhân chủ xe. Ngay cả các công ty cho thuê ô tô nổi tiếng như SIXT và HERTZ cũng chứng kiến sự sụt giảm số lượng xe điện trong đội xe cho thuê của họ do chi phí sửa chữa cao liên quan đến hư hỏng pin, đặc biệt là do va chạm. Thông tin này được Reuters đưa tin vào tháng 1 năm 2024 nhằm nêu bật tầm quan trọng của việc bảo vệ pin xe điện để đảm bảo tuổi thọ của chúng và giảm thiểu chi phí sửa chữa.
Trong blog này, chúng ta sẽ xem xét kỹ hơn những thách thức và giải pháp xung quanh việc bảo vệ pin xe điện của bạn. Sử dụng Simcenter Amesim, chúng tôi sẽ trình bày cách bạn có thể hiểu rõ hơn những rủi ro do va chạm và lái xe gập ghềnh gây ra, đồng thời khám phá các chiến lược để bảo vệ thành phần quan trọng này.
Mô hình hóa pin trong Simcenter Amesim
Simcenter Amesim cung cấp những khả năng rất có giá trị khi phát triển và tích hợp các bộ phận trong xe điện. Nó cho phép bạn đánh giá các đặc tính hiệu suất chính như phạm vi hoạt động, hiệu suất của xe , hiệu suất nhiệt và tuổi thọ pin . Trong blog này, chúng tôi sẽ trình bày các mô hình demo được phát triển trong Simcenter Amesim giúp phân tích tác động của pin xe điện khi lên gờ giảm tốc, tùy thuộc vào vận tốc của ô tô cũng như chiều cao và hình dạng của gờ giảm tốc.
Địa điểm thử nghiệm ảo
Địa điểm thử nghiệm được tạo bằng công cụ Ground Designer và bộ pin của nền ván trượt được nối lưới bằng các mô hình con tiếp xúc hình cầu dạng lưới. Gờ giảm tốc ngày càng được sử dụng nhiều hơn để đảm bảo tốc độ thấp trong khu vực thành thị. Tùy theo quốc gia mà chúng có nhiều hình dáng, chiều cao và chiều rộng; một số tiêu chuẩn tồn tại và ít nhiều được tôn trọng. Địa điểm thử nghiệm được sử dụng trong bản demo này bao gồm 3 loại gờ giảm tốc:

- Gờ giảm tốc hình bán nguyệt
- Gờ giảm tốc hình sin
- Gờ giảm tốc hình thang
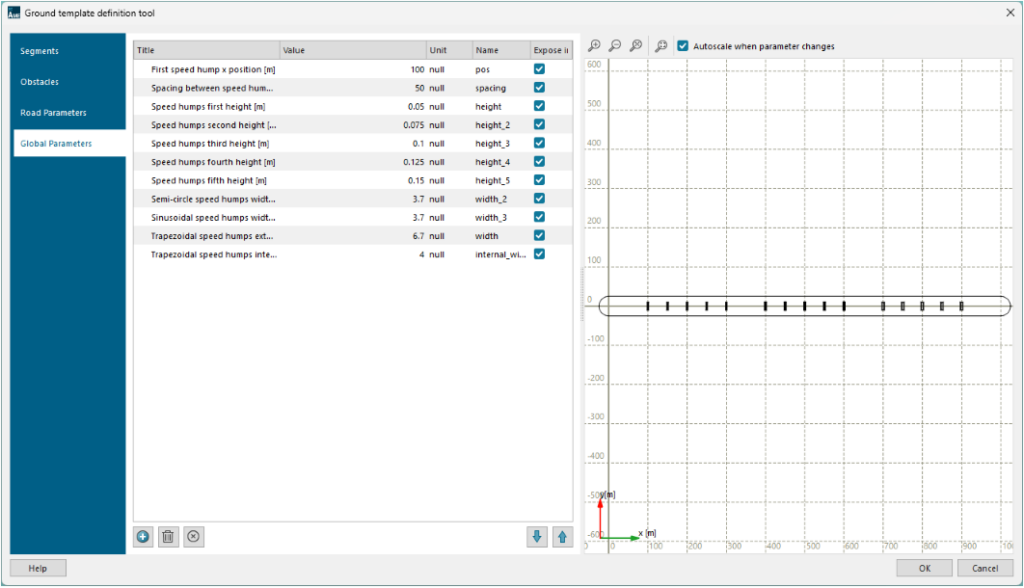
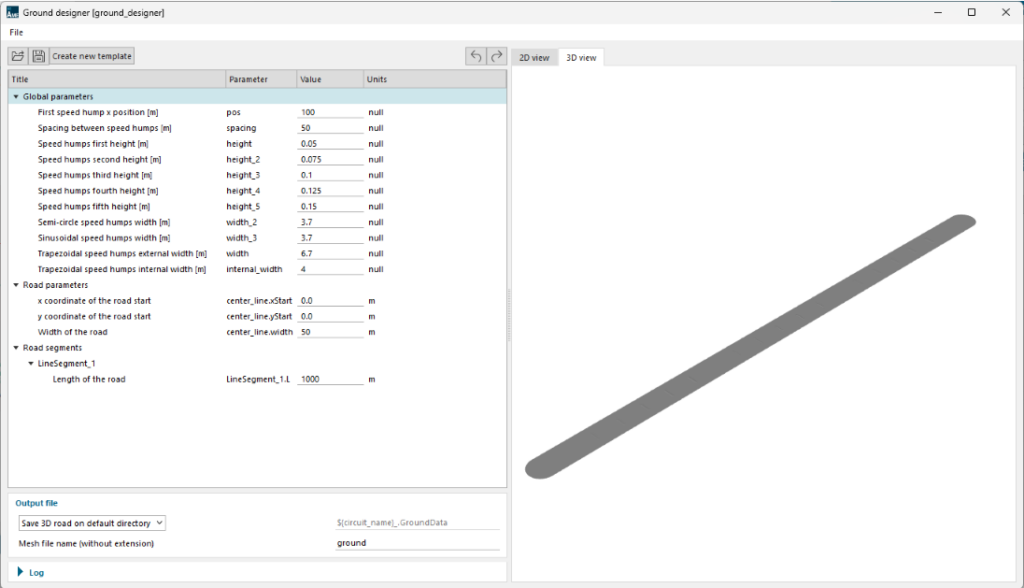
Đối với mỗi loại gờ giảm tốc tương ứng với 5 độ cao khác nhau được thử nghiệm: h 1 = 5 cm, h 2 = 7,5 cm, h 3 = 10 cm, h 4 = 12,5 cm và h 5 = 15 cm. Mặt bằng thử nghiệm này sau đó được tạo ra trong Simcenter Amesim bằng ứng dụng thiết kế mặt đất.

Trình tự với vô số va chạm tốc độ
Một số thông số được hiển thị trong ứng dụng thiết kế mặt đất, mang lại khả năng sửa đổi một số thông số nhất định của mặt đất kiểm chứng này.
Mô hình xe
Hệ thống truyền động điện được mô hình hóa bằng thư viện IFP Drive và mô hình khung gầm chủ yếu sử dụng các thành phần thư viện động lực học của xe.
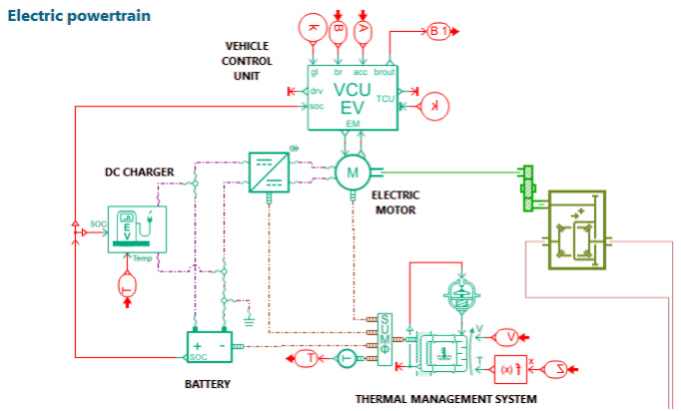
Mô hình hệ thống truyền lực
Mô hình này bao gồm VCU, động cơ điện, hệ thống pin, bộ sạc và mô hình nhiệt đơn giản của pin và hệ thống làm mát của nó. Hệ thống phanh bao gồm một hệ thống thủy lực đơn giản và một mô hình nhiệt cơ bản. Hệ số ma sát được tính như một hàm của nhiệt độ đĩa theo bảng sau:
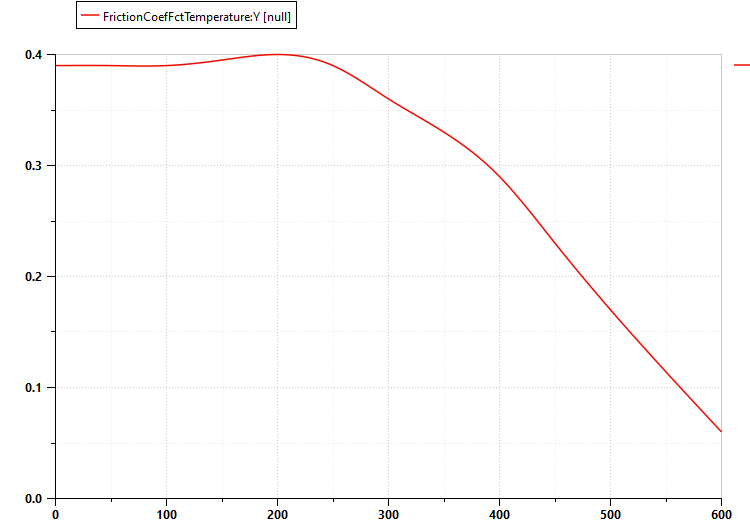
Hệ số ma sát với nhiệt độ
Bản phác thảo mô hình cuối cùng bao gồm mô hình khung gầm chi tiết 15 DoF của các mẫu khung xe Tesla và lốp Pacejka. Mô hình trình điều khiển được điều chỉnh tự động mới sẽ đi theo quỹ đạo trên mặt đất gập ghềnh đã xác định.
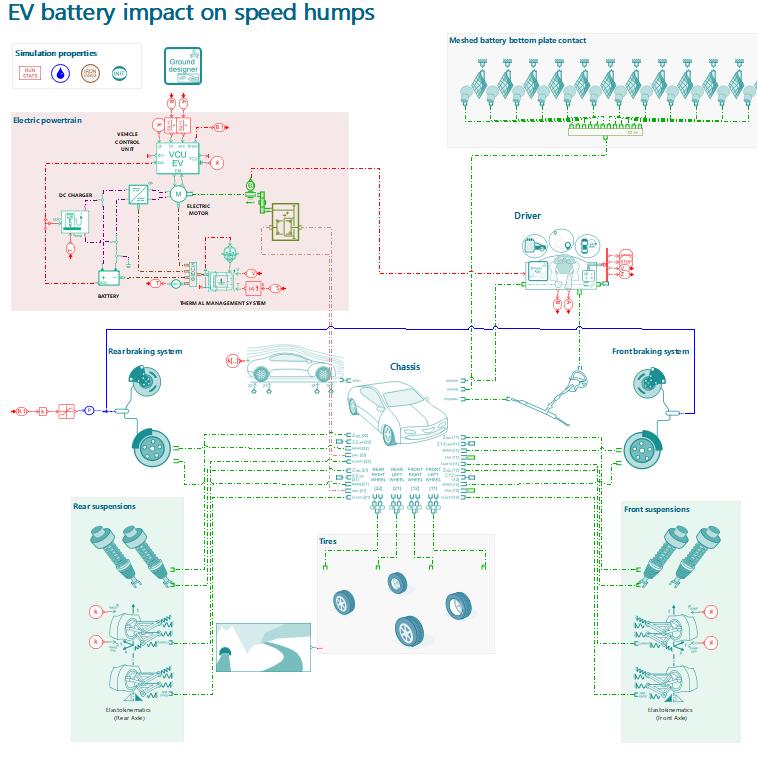
Mẫu xe hoàn chỉnh cuối cùng
Bộ pin tích hợp
Bộ pin được nối lưới bằng 12 điểm tiếp xúc hình cầu dạng lưới. Các điểm tiếp xúc này tạo thành một lưới rất đơn giản để nối lưới bộ pin, như minh họa bên dưới.
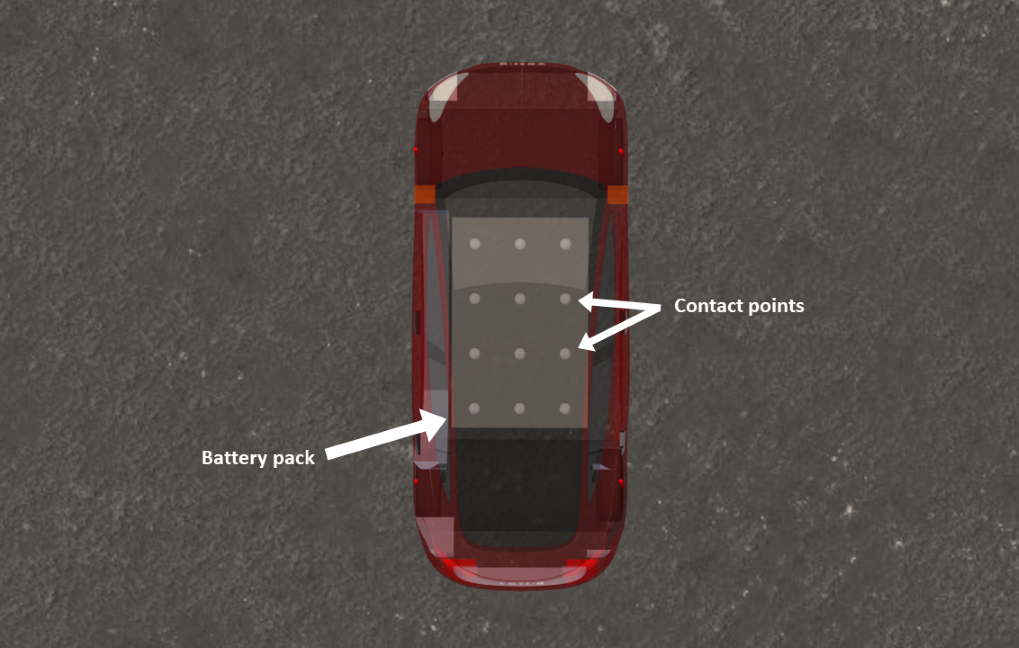
Lưới gói pin
Tính năng phát hiện người liên hệ sử dụng phương pháp Phân cấp khối lượng giới hạn (BVH) . Lần phát hiện tiếp xúc đầu tiên là ở mức Âm lượng giới hạn (BV) . Nếu một tiếp điểm xuất hiện giữa BV của hình cầu và BV cuối của BVH, thì việc phát hiện tiếp xúc sẽ được tính toán giữa hình cầu và tam giác bên trong BV cuối. Hình ảnh tiếp theo thể hiện 3 quả cầu tiếp xúc với một hoặc nhiều hình tam giác.
- Quả cầu 1 chỉ có 1 mặt phẳng tiếp xúc với tam giác 1
- Quả cầu 2 có 5 điểm tiếp xúc với các tam giác 1, 2, 3, 4 và 5
- Quả cầu 3 có 2 đoạn tiếp xúc với tam giác 3 và 4
- Mỗi quả cầu chỉ có một phản lực
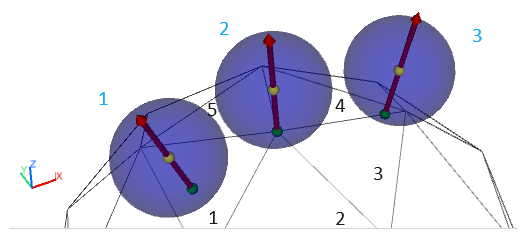
Phát hiện liên lạc lưới hình cầu
Kết quả
Sau đó, chiếc Tesla được lái trên bãi thử ở năm tốc độ khác nhau:
- tốc độ thấp: 5 m/s (khoảng 18 km/h hoặc 11 mph)
- tốc độ bình thường: 10 m/s (khoảng 36 km/h hoặc 22 mph)
- tốc độ cao: 15 m/s (khoảng 54 km/h hoặc 34 mph)
- tốc độ rất cao: 20 m/s (khoảng 72 km/h hoặc 45 mph)
Ba cấu hình tốc độ đầu tiên không hoàn toàn cố định để xác định chính xác hơn hành vi của người lái xe khi đến gần gờ giảm tốc. Nếu xe di chuyển với tốc độ 5, 10 và 15 m/s qua chỗ xóc, xe sẽ đi nhanh hơn trên đoạn đường bằng phẳng, phanh trước khi vượt qua chỗ xóc và tăng tốc ngay sau đó (xem các đoạn đường cong bên dưới).
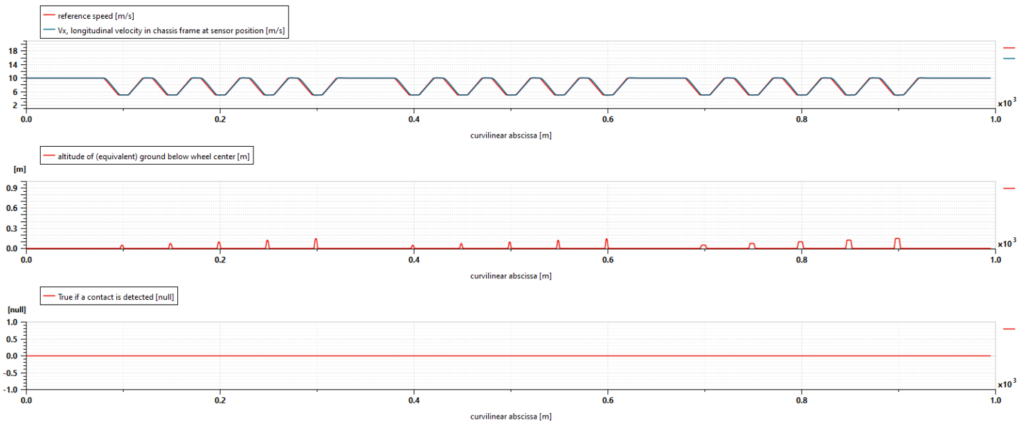
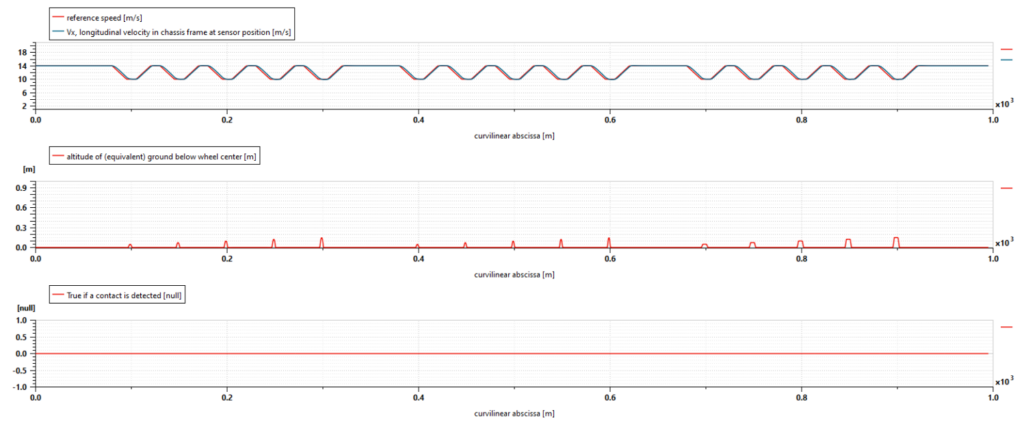
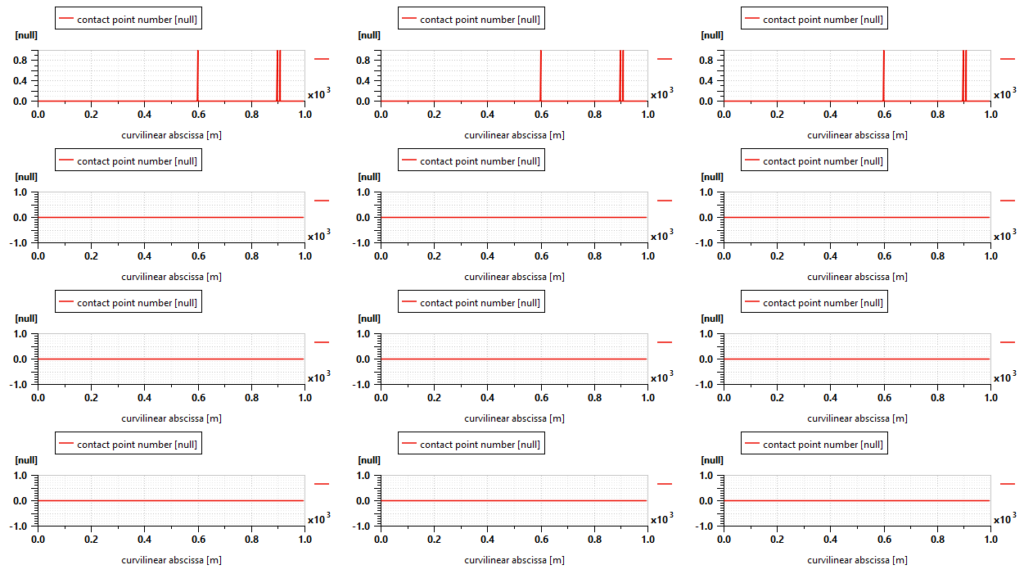
Một số đồ thị được tạo ra để nghiên cứu hành vi của chiếc xe. Các mô hình con tiếp xúc dạng lưới bao gồm một biến “số điểm tiếp xúc” có thể được sử dụng để theo dõi sự xuất hiện của một tiếp điểm. Bằng cách tính tổng biến này cho tất cả các điểm tiếp xúc, người ta dễ dàng phát hiện xem pin có chạm đất hay không, vì tổng sẽ lớn hơn 0. Ở tốc độ thấp và tốc độ bình thường, người ta có thể quan sát thấy pin không chạm đất. Ngược lại, khi tốc độ vượt quá 50 km/h hoặc 30 dặm/giờ, tức là giới hạn tốc độ thông thường ở khu vực thành thị ở nhiều quốc gia, người ta có thể quan sát thấy rằng một số điểm tiếp xúc được phát hiện khi đang lái xe ở những gờ giảm tốc độ cao nhất.
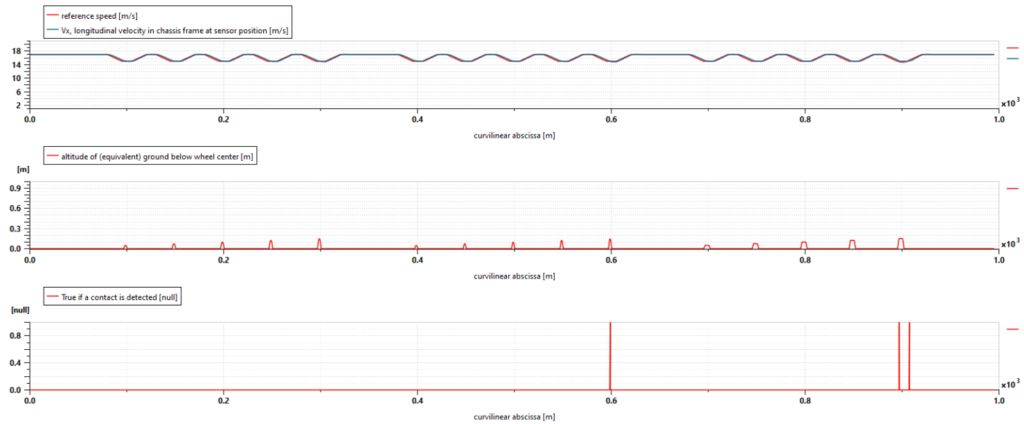
Một số liên hệ được tìm thấy ở tốc độ cao
Các lô khác có thể được sử dụng để xác định vị trí các liên hệ này. Có thể thấy rõ khu vực bị ảnh hưởng nhiều nhất chính là mặt trước của bộ pin. Loại nghiên cứu này có thể giúp xác định những điểm yếu nhất của pin và định vị các tấm gia cố.
Bản địa hóa các điểm liên lạc
Cuối cùng, mô hình con tiếp xúc dạng cầu lưới cho phép ước tính lực tiếp xúc và độ xuyên thấu trong quá trình va chạm để xác định xem bộ pin có bị hư hỏng nghiêm trọng hay không, cũng như kích thước các tấm gia cố. Ví dụ: đây là so sánh độ xuyên thấu và lực tác dụng lên mặt trước của bộ pin trong khoảng từ 15 m/s (màu xanh lam) đến 20 m/s (màu đỏ).
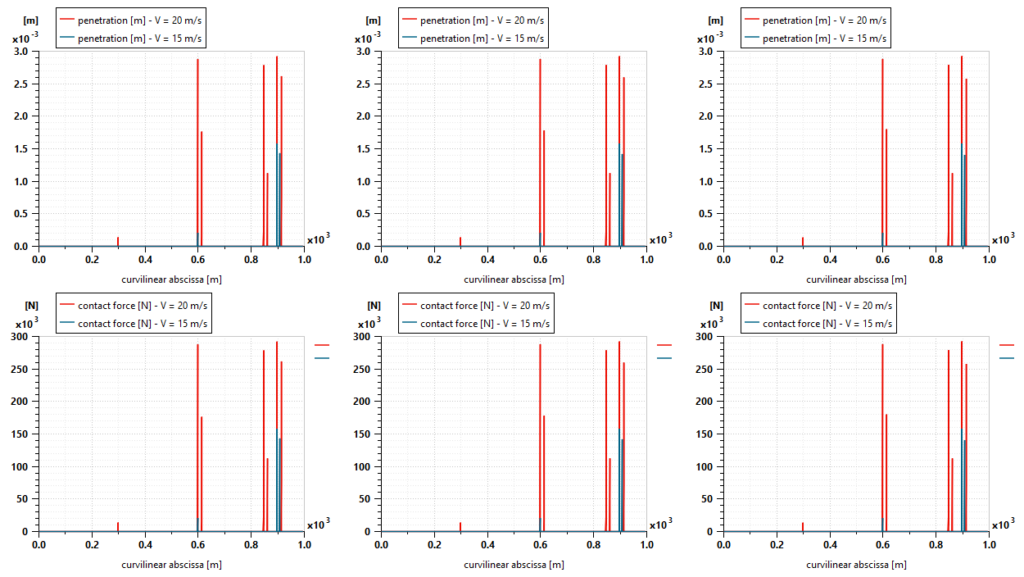
So sánh lực xuyên và lực – điểm tiếp xúc phía trước
Hoạt ảnh 3D giúp người dùng hình dung vị trí xảy ra các điểm tiếp xúc trên bộ pin.
Phần kết luận
Blog này trình bày cách khả năng mô phỏng đa vật lý từ Simcenter Amesim có thể giúp các kỹ sư ô tô phân tích các cú sốc tiếp xúc có thể xảy ra đối với bộ pin, tùy thuộc vào các thiết kế khung gầm khác nhau. Các khớp nối trên cùng một bản phác thảo mô phỏng của khung xe, hệ thống truyền động và hình dạng bộ pin cho phép chúng tôi có được phân tích ảo chính xác về thiệt hại gây ra. Một số mô-đun pin tách rời, mô-đun có thành được gia cố trên một số bộ phận của bộ pin có thể được xác định bằng mô hình mô phỏng này. Bước tiếp theo, các kỹ sư có thể xem xét thiết kế hệ thống treo chủ động sử dụng cảm biến và bộ điều khiển ADAS để thay đổi độ cứng của hệ thống treo. Sau khi phát hiện chướng ngại vật (gờ giảm tốc, ổ gà…) bằng camera hoặc lidar, bộ điều khiển ADAS sẽ tương tác với hệ thống phụ hệ thống treo chủ động để tăng độ cứng ngay trước va chạm nhằm tránh làm hỏng ắc quy. Tất cả điều này đều có thể thực hiện được với Simcenter Amesim.
Nguồn: Siemens
SDE TECH là SMART EXPERT PARTNER của Siemens Digital Industries Software tại Việt Nam cho các giải pháp PLM – Số hóa nhà máy (Digital Enterprise): Siemens NX, Tecnomatix và Teamcenter. Chúng tôi tự tin về năng lực tư vấn và chuyển giao các giải pháp chất lượng cao trong lĩnh vực CAD/CAM/CAE/PLM.
 Quý doanh nghiệp, khách hàng có nhu cầu liên hệ SDE TECH theo thông tin sau:
Quý doanh nghiệp, khách hàng có nhu cầu liên hệ SDE TECH theo thông tin sau: